Soft Code Program for Self Driving Robot
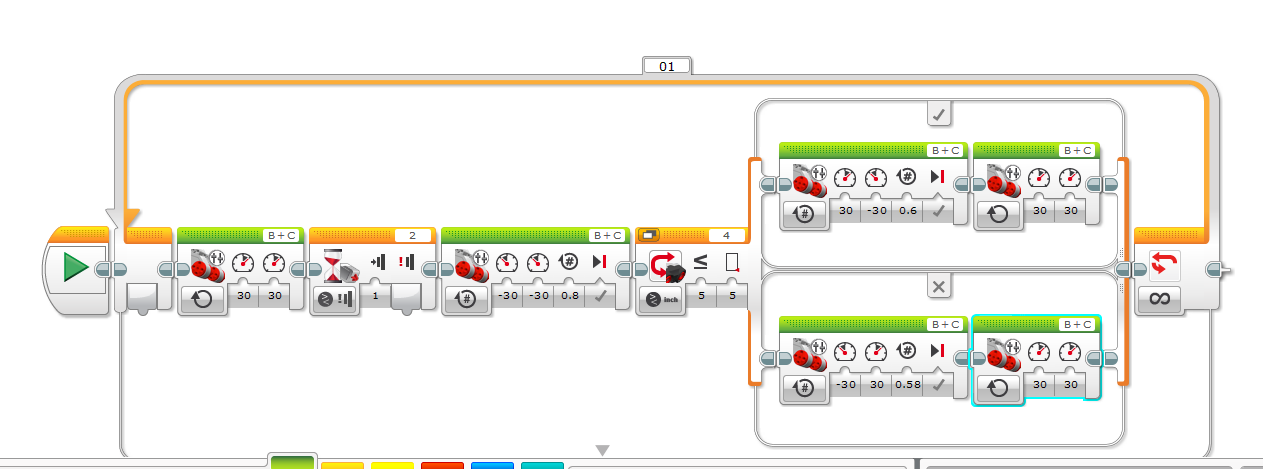
The Ultrasonic sensor is mounted on the side of the robot. After the bot backs up the US sensor looks to see what's in front of it, what is on the right side of the robot. If it sees a wall on the right side it will make a left turn. If not it makes a right turn.
